1. Positionnement de l’entreprise et des produits
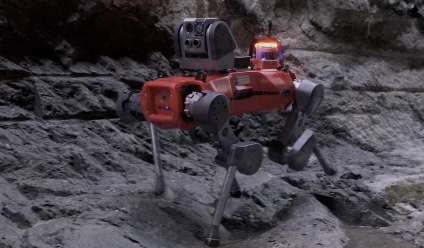
Basée aux États-Unis, Ghost Robotics se concentre sur les plateformes terrestres quadrupèdes sans pilote, et son produit principal est le Vision 60 Q-UGV (Quadrupedal Unmanned Ground Vehicle). Le positionnement global est un robot hautement fiable qui peut être « en service longtemps dans des environnements extérieurs complexes », et est utilisé pour des tâches d’inspection et de sécurité dans des situations à haut risque telles que la défense nationale, la sécurité publique, ainsi que l’industrie, l’énergie et la construction.
2. Paramètres de base et caractéristiques matérielles du Vision 60
Le Vision 60 adopte une structure quadrupède entièrement électrique, d’environ 51 kg, d’une capacité de charge d’environ 10 kg et d’une vitesse maximale de 2,4 m/s, ce qui le rend adapté pour l’installation de divers capteurs et équipements de communication pour les patrouilles mobiles.
En termes d’autonomie de la batterie, il peut marcher en continu pendant environ 3 heures à une vitesse de 0,9 m/s et rester en veille plus de 20 heures, ce qui le rend adapté à des tâches d’inspection automatique avec de longs trajets.
L’ensemble de la machine est certifié IP67, avec une plage de température de fonctionnement d’environ -40°C à 55°C, et avec des patins remplaçables, elle supporte le travail sous la pluie, la neige, le sable, le gravier et d’autres terrains, correspondant à l’orientation technique « multiterrain toutes saisons + extérieur ».
La plateforme de calcul utilise NVIDIA Xavier, équipée de SSD haute capacité et de multiples interfaces à haute vitesse, et peut monter des lidars 3D, des caméras en faible luminosité, des caméras thermiques, des capteurs CBRN, et plus encore, formant une plateforme de charge utile hautement modulaire.
3. Contrôle de la navigation et écologie logicielle
En ce qui concerne la navigation, le Vision 60 supporte la multi-caméra, la caméra de profondeur et le positionnement RTK GPS fusion, qui peut fonctionner aussi bien en environnement GPS que limité par GPS, et offre le « mode aveugle » pour la redondance de la foule dans des conditions de faible perception.
Le côté logiciel propose des interfaces telles que C/C++, ROS/ROS2 et MAVLink, ainsi qu’un environnement de simulation, facilitant l’intégration dans les systèmes de commandement existants ou l’utilisation comme plateforme de recherche scientifique. La plateforme Mission Control prend en charge la surveillance unifiée en ligne, la visualisation de l’état de l’alimentation et de l’état de santé, la planification des tâches en point-and-click, ainsi que la superposition cartographique de multiples résultats vidéo et de détection, facilitant ainsi le déploiement de flottes multi-locomotives.
4. Scénarios d’application typiques et suggestions de sélection
La Vision 60 a été utilisée lors de patrouilles militaires et policières, de sécurité du périmètre des aéroports et des bases, de recherche et sauvetage post-catastrophe, d’inspections de zones à risque chimiques et de raffineries, d’inspections de ponts et de chantiers de construction, ainsi que dans d’autres scénarios. Ses avantages sont : résister à des environnements difficiles, se déplacer lentement pendant longtemps, et continuer à « voir » et « écouter » avec un ensemble complet de capteurs, remplaçant ainsi la tâche manuelle dans des zones dangereuses pendant longtemps.
Pour les utilisateurs, il convient davantage comme « plateforme de détection hautement fiable » qu’en tant que robot qui mène des charges élevées ou des opérations complexes à deux mains. Si l’accent est mis sur la sécurité extérieure, l’inspection non surveillée, ainsi que sur les plateformes de recherche scientifique et d’expérimentation, l’intégrité matérielle et l’ouverture logicielle de la Vision 60 seront plus attractives.
Questions fréquemment posées sur les questions-réponses
Q1 : Quelles sont les différences significatives entre la Vision 60 et le « chien robot » à quatre pattes commun ?
R : Il est plus adapté à un déploiement à long terme qu’à des démonstrations sur campus ou en intérieur : haut niveau de protection, large plage de températures, autonomie garantie, plateforme de contrôle de mission et architecture de communication de qualité industrielle.
Q2 : Quelle est la valeur de Vision 60 si vous réalisez un projet universitaire ou d’institution de recherche ?
R : Il offre un châssis mécanique, moteur et de perception mature, permettant aux équipes de recherche de se concentrer sur les algorithmes de perception, la collaboration multi-robots, l’apprentissage par renforcement et la planification des tâches, sans avoir à résoudre les problèmes de fiabilité et d’intembie à partir de zéro.
Q3 : Est-il adapté à une utilisation directe comme « robot de manipulation » ?
R : Il n’y a pas de problème avec les capteurs et outils portant moins de 10 kg, mais ils ne sont pas efficaces pour manipuler des matériaux volumineux ; Un positionnement plus raisonnable est celui d’un « sentinelle mobile se promenant avec des capteurs », axé sur la collecte d’informations plutôt que sur la gestion logistique.
Q4 : Quelle est la signification pratique du nouveau bras manipulateur lancé ?
R : Le bras robotique permet au Vision 60 d’ouvrir des portes, de ramasser et de placer de petits objets, d’utiliser des équipements simples et d’autres actions, et de s’étendre vers une plateforme mobile avec un « environnement d’exploitation simple » en préservant la mobilité d’origine, tout en restant une capacité d’exploitation légère.