1. Unternehmens- und Produktpositionierung
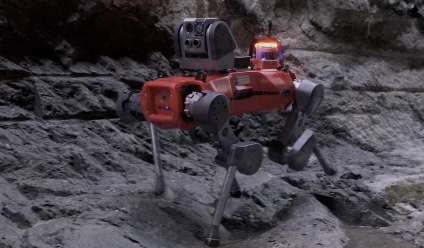
Mit Hauptsitz in den Vereinigten Staaten konzentriert sich Ghost Robotics auf vierbeinige unbemannte Bodenplattformen, und das Kernprodukt ist die Vision 60 Q-UGV (Quadrupedal Unmanned Ground Vehicle). Die Gesamtpositionierung ist ein äußerst zuverlässiger Roboter, der "lange im Einsatz in komplexen Außenumgebungen" sein kann und für Inspektions- und Sicherheitsaufgaben in Hochrisikoszenarien wie Verteidigung, öffentliche Sicherheit sowie Industrie, Energie und Bauwesen eingesetzt wird.
2. Kernparameter und Hardwarefunktionen von Vision 60
Die Vision 60 verfügt über eine vollelektrische, vierbeinige Antriebsstruktur mit einem Gesamtgewicht von etwa 51 kg, einer Tragfähigkeit von etwa 10 kg und einer Höchstgeschwindigkeit von 2,4 m/s, was sie für die Montage verschiedener Sensoren und Kommunikationsgeräte für mobile Patrouillen geeignet macht.
Was die Akkulaufzeit betrifft, kann er etwa 3 Stunden ununterbrochen mit einer Geschwindigkeit von 0,9 m/s laufen und mehr als 20 Stunden im Standby bleiben, was ihn für automatische Inspektionsaufgaben mit langen Strecken geeignet macht.
Die gesamte Maschine ist IP67-zertifiziert, mit einem Betriebstemperaturbereich von etwa -40 °C bis 55 °C und mit austauschbaren Fußpads unterstützt sie Arbeiten in Regen, Schnee, Sand, Kies und anderen Geländen, entsprechend der technischen Ausrichtung "Allwetter + Außengelände".
Die Rechenplattform verwendet NVIDIA Xavier, ausgestattet mit hochkapazitäben SSDs und mehreren Hochgeschwindigkeitsschnittstellen, und kann 3D-Lidar, Low-Light-Kameras, Wärmebildkameras, CBRN-Sensoren und mehr montieren und so eine hochgradig modulare Nutzlastplattform bilden.
3. Navigationssteuerung und Softwareökologie
Was die Navigation betrifft, unterstützt Vision 60 Mehrkamera-, Tiefenkamera- und RTK-GPS-Fusionspositionierung, die sowohl in GPS-guten als auch GPS-begrenzten Umgebungen funktionieren kann, und bietet den "Blind Mode" für Gangredundanz bei niedrigen Wahrnehmungsbedingungen.
Die Softwareseite bietet Schnittstellen wie C/C++, ROS/ROS2 und MAVLink sowie eine Simulationsumgebung, was die Integration in bestehende Befehlssysteme oder die Nutzung als wissenschaftliche Forschungsplattform erleichtert. Die Mission Control-Plattform unterstützt eine einheitliche webbasierte Überwachung, Leistungs- und Gesundheitszustandsanzeige, Point-and-Click-Aufgabenplanung sowie eine Kartenüberlagerung mehrerer Video- und Erkennungsergebnisse, was den Einsatz von Mehrlokwagenflotten erleichtert.
4. Typische Anwendungsszenarien und Auswahlvorschläge
Vision 60 wurde bei Militär- und Polizeipatrouillen, Flughafen- und Stützpunktsicherung, Such- und Rettungsmaßnahmen nach Katastrophen, Inspektionen von Chemikalien- und Raffineriegefährdenbereichen, Brücken- und Baustelleninspektionen sowie anderen Szenarien eingesetzt. Seine Vorteile sind: Widerstand für harte Umgebungen, langanhaltende Bewegung und kontinuierlich "sehen" und "hören" mit einem vollständigen Sensorensatz, wodurch manuelle Arbeit in gefährlichen Bereichen über lange Zeit ersetzt wird.
Für Nutzer eignet er sich eher als "hochzuverlässige Sensorplattform" als als Roboter, der hohe Lasthandhabung oder komplexe zweihändige Operationen anstrebt. Wenn der Fokus auf Außensicherheit, unbeaufsichtigter Inspektion sowie wissenschaftlichen Forschungs- und Experimentierplattformen liegt, wird die Hardwareintegrität und Software-Offenheit des Vision 60 attraktiver sein.
Fragen & Antworten Häufig gestellte Fragen
F1: Was sind die wesentlichen Unterschiede zwischen dem Vision 60 und dem gängigen vierbeinigen "Roboterhund"?
A: Es eignet sich eher für den Langzeiteinsatz als für Campus- oder Innenvorführungszwecke: hoher Schutz, großer Temperaturbereich, garantierte Batterielaufzeit, unterstützende Missionskontrollplattform und eine industrielle Kommunikationsarchitektur.
F2: Welchen Wert hat Vision 60, wenn Sie ein Universitäts- oder Forschungsprojekt durchführen?
A: Es bietet ein ausgereiftes mechanisches, Antriebs- und Wahrnehmungschassis, das es Forscherteams ermöglicht, sich auf Wahrnehmungsalgorithmen, Zusammenarbeit mit mehreren Robotern, Verstärkungslernen und Aufgabenplanung zu konzentrieren, ohne Zuverlässigkeits- und Weathering-Probleme von Grund auf lösen zu müssen.
F3: Ist er für den direkten Einsatz als "Handhabungsroboter" geeignet?
A: Es gibt kein Problem mit Sensoren und Werkzeugen, die weniger als 10 kg tragen, aber sie sind nicht gut im Umgang mit großen Materialien geeignet; Eine vernünftigere Positionierung ist ein "mobiler Wächter, der mit Sensoren herumläuft", wobei der Fokus auf Informationssammlung statt logistischer Handhabung liegt.
F4: Welche praktische Bedeutung hat der neu eingeführte Manipulatorarm?
A: Der Roboterarm ermöglicht es dem Vision 60, Türen zu öffnen, kleine Gegenstände aufzuheben und zu platzieren, einfache Geräte und andere Aktionen zu bedienen und sich auf der Grundlage der ursprünglichen Mobilität zu einer mobilen Plattform mit einer "einfachen Betriebsumgebung" auszuweiten, aber es bleibt eine leichte Betriebsfähigkeit.