1. 企業および製品のポジショニング
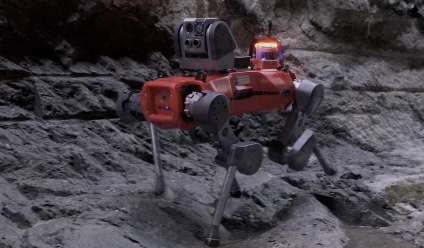
本社はアメリカ合衆国にあり、四足歩行の地上無人プラットフォームに注力しており、その中核製品はVision 60 Q-UGV(四足歩行無人地上車両)です。 全体の位置取りは「複雑な屋外環境で長時間勤務可能」の非常に信頼性の高いロボットであり、国防、公共安全、産業、エネルギー、建設などの高リスクシナリオでの検査や警備任務に使用されます。
2. Vision 60のコアパラメータとハードウェア機能
ビジョン60は全電動駆動の四足歩架構造を採用しており、総重量約51kg、搭載能力約10kg、最大速度2.4m/sで、移動哨戒用の各種センサーや通信機器の搭載に適しています。
バッテリー寿命に関しては、0.9m/sの速度で約3時間連続歩行でき、20時間以上待機できるため、長距離走行の自動検査作業に適しています。
機械全体がIP67認証を受けており、動作温度範囲は約-40°Cから55°Cで、交換可能な足パッドを備えています。雨、雪、砂、砂利などの地形での作業に対応しており、「全天候+屋外マルチテレーン」という工学的志向に対応しています。
この計算プラットフォームはNVIDIA Xavierを採用し、大容量SSDと複数の高速インターフェースを搭載し、3Dライダー、低照度カメラ、サーマルカメラ、CBRNセンサーなどを搭載可能で、高度にモジュール化されたペイロードプラットフォームを形成しています。
3. ナビゲーション制御とソフトウェア生態系
ナビゲーション面では、Vision 60はマルチカメラ、深度カメラ、RTK GPS融合位置測定に対応しており、GPSが良好な環境でもGPS制限環境でも動作可能で、低知覚条件下での歩行冗長性のための「ブラインドモード」も提供しています。
ソフトウェア側はC/C++、ROS/ROS2、MAVLinkなどのインターフェースやシミュレーション環境を提供し、既存のコマンドシステムへの統合や科学研究プラットフォームとしての利用が容易です。 ミッションコントロールプラットフォームは、統一されたウェブベースの監視、電力および健康状態の閲覧、ポイント&クリックによるタスク計画、複数のビデオおよび検出結果の地図オーバーレイをサポートし、複数機関車の車両を派遣するのに便利です。
4. 典型的な応用シナリオと選考の提案
ビジョン60は軍や警察のパトロール、空港および基地周辺の警備、災害後の捜索救助、化学・製油所の危険区域検査、橋梁や建設現場の検査など、さまざまなシナリオで使用されています。 その利点は、過酷な環境に耐え、長時間ゆっくり移動し、完全なセンサーセットで継続的に「見たり聞いたり」できることで、危険な地域での手動作業に代わり長期間にわたります。
ユーザーにとっては、高負荷の扱いや複雑な両手作業を追求するロボットよりも、「高信頼性のセンシングプラットフォーム」として適しています。 屋外のセキュリティ、無人検査、科学研究・実験プラットフォームに重点が置かれているなら、Vision 60のハードウェアの整合性とソフトウェアの開放性はより魅力的になるでしょう。
Q&A よくある質問
Q1: Vision 60と一般的な四足の「ロボット犬」との間に大きな違いは何ですか?
A: キャンパスや屋内デモンストレーションよりも長期展開に適しており、高い防護レベル、広い温度範囲、保証されたバッテリー寿命、ミッションコントロールプラットフォームのサポート、産業用通信アーキテクチャを備えています。
Q2: 大学や研究機関のプロジェクトを行う場合、ビジョン60の価値は何ですか?
A: 成熟した機械的、駆動力、知覚のシャーシを提供し、研究チームは信頼性や耐候性の問題を一から解決することなく、知覚アルゴリズム、マルチロボット協働、強化学習、タスクプランニングに集中できるようにします。
Q3: 「ハンドリングロボット」として直接使用するのに適していますか?
A: 10kg未満のセンサーや工具を運ぶことに問題はありませんが、大型の材料の取り扱いには適していません。 より合理的な配置は「センサーを携えた移動型センチネル」であり、物流の扱いよりも情報収集に重点を置くものです。
Q4: 新たに打ち上げられたマニピュレーターアームの実用的な意義は何ですか?
A: ロボットアームにより、Vision 60はドアの開閉、小さな物の持ち上げ・配置、簡単な機器やその他の操作を可能にし、元の移動性を維持しつつ「シンプルな操作環境」を持つ移動プラットフォームへと拡張できますが、それでも軽量な操作能力です。